转载自:人行机器人世界
2025年5月29日,由国家地方共建人形机器人创新中心(以下简称“国地中心”)和上海张江(集团)有限公司共同主办的2025张江具身智能开发者大会暨张江人形机器人创新创业大赛将在上海浦东新区盛大举行。
本次活动将汇集200余家人形机器人、具身智能和产业链头部企业,吸引1000余位知名院士、专家、企业领袖及开发者,共同探讨人形机器人产业的技术突破与商业落地路径。这是一场真正意义上的行业顶级盛会,以“峰会+大赛+展览”三位一体的模式,全方位展示人形机器人技术与产业的最新进展。
在本次大会上,国地中心将联合复旦大学正式发布全球首款生成式人形机器人运动大模型—— “龙跃”(MindLoongGPT),此举将标志着我国在智能体运动控制领域迈入全球领先行列。
“龙跃”MindLoongGPT:生成式机器人运动大模型的革命性突破
■ 从实验室到产业应用,重新定义人机交互
人形机器人如何像人类一样自然运动?如何通过语言指令让机器人理解并执行复杂动作?这一直是行业亟待突破的技术瓶颈。国地中心联合复旦大学未来信息创新学院研发的龙跃MindLoongGPT大模型,以“自然语言驱动”为核心,构建了从多模态输入到高保真动作生成的完整闭环,彻底颠覆传统运动控制范式。
■ 四大核心技术优势,引领行业标杆
1. 多模态交互,低门槛驱动
MindLoongGPT支持文本、语音、图像等多模态输入,用户只需说出“挥手致意”或上传一段参考视频,模型即可自动解析语义并生成连贯动作。传统方法依赖专业参数调整的桎梏被打破,真正实现“人人可用”。
2. 拟真度与时序一致性双突破
通过将人体动作视为“时序语言”,MindLoongGPT对动作序列逐帧建模,精准捕捉动作间的连续性,解决了长序列生成中的僵硬、跳跃问题。生成的跑步、舞蹈等动作不仅流畅自然,更保留真实人体的惯性节奏。
3. 结构生成与细节优化并重
模型采用分阶段生成策略,从全局姿态到局部关节角度均实现毫米级精度控制。无论是手指微操还是全身腾跃,细节表现力媲美真人。
4. 轻量化设计,赋能广泛场景
在保证性能的前提下,MindLoongGPT模型体积压缩至同类型产品的1/3,可在教育机器人、智能穿戴设备等嵌入式平台实时运行,为产业落地铺平道路。
MindLoongGPT的差异化竞争力:为什么它是“不可替代”的?
■ 技术为骨,应用为翼,打造全链条解决方案
当前市场中的动作生成模型往往存在两大痛点:一是依赖高算力硬件,难以低成本部署;二是生成结果机械呆板,缺乏可控性。
MindLoongGPT通过三大创新设计,构建了独特的市场护城河:
1. 自然语言驱动,开启交互新范式
用户无需学习专业术语或操作复杂软件,仅需像与人类对话一样发出指令,例如“以优雅的姿势递上一杯咖啡”,MindLoongGPT即可结合语义理解生成对应动作,并支持通过追加指令实时调整细节。这一能力在教育、服务机器人领域具有颠覆性意义。
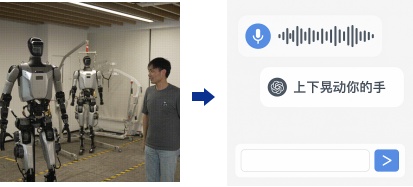
语音到文本的转化
2. 生成+编辑双模式,满足定制化需求
MindLoongGPT不仅支持一键生成动作,还开放了风格、节奏、速度等参数接口。企业用户可基于生成的初始动作进行二次创作,例如将“步行”调整为“卡通蹦跳”或“机械步态”,极大拓展了模型的适用场景。
动作生成
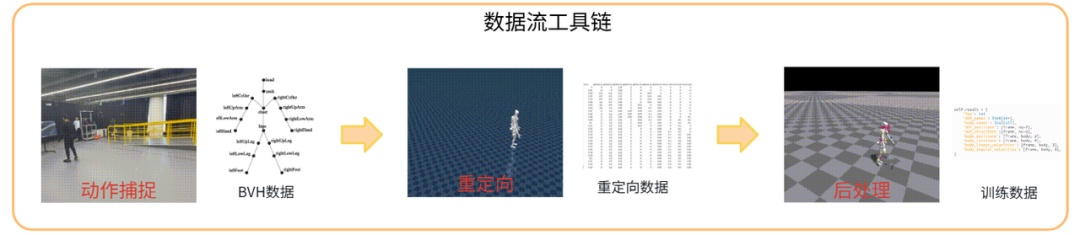
3. 全链条部署方案,打通最后一公里
从动作生成到实机部署,MindLoongGPT提供完整的工具链支持:
模型重定向技术:通过优化的retarget算法,实现人体模型与不同机器人URDF结构的快速适配,解决硬件异构难题;
模型重定向
上位控制软件集成:支持主流机器人操作系统(ROS、V-REP等),生成动作可直接导入实机测试,部署效率提升80%。
动作部署
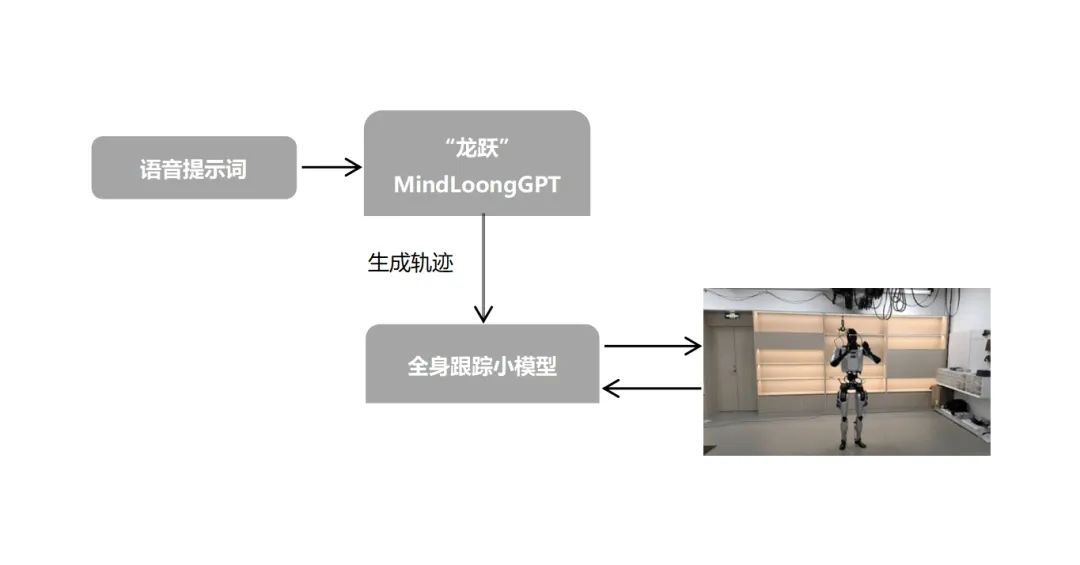
4. 大模型与小模型联合,高效实现各种复杂动作与舞蹈特技:
“龙跃”MindLoongGPT:具有7B的模型参数大小,支持
通过“龙跃”MindLoongGPT生成特技动作运动轨迹,作为部署的全身跟踪小模型的输入目标观测,从而可以在青龙上实现丰富的全身动作。
开源全身运动数据集与全工具链同步发布
■ 开源全身运动数据集
国地中心拥有5000平米训练场,集采集,测试,训练的功能于一体。102台数采机器人,可支撑每天3万条机器人数据采集,地面真值测试,人体数据采集,仿生数据采集。
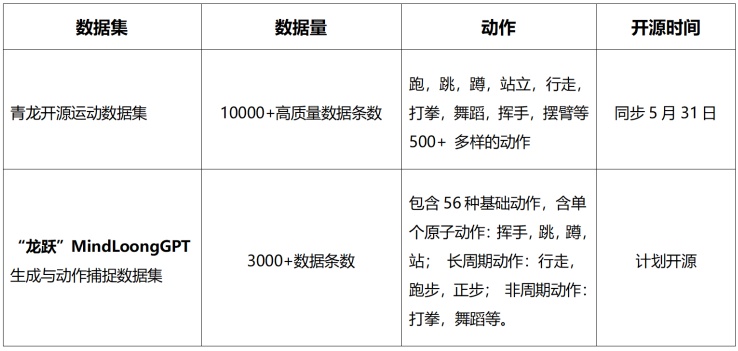
国地中心发布开源全身运动数据集,形成业内领先的人形动作数据库,包含10000+重映射后的高质量动作条数,以及包括原子动作,连续动作,套路动作等不同类型的动作,其主要数据来源如下表所示:
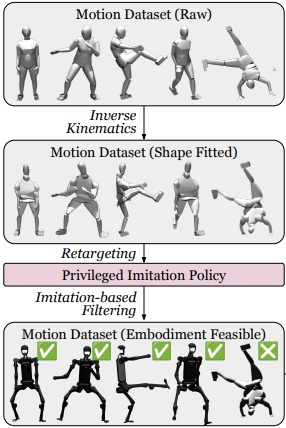
■ 开源人体动作映射全栈工具链
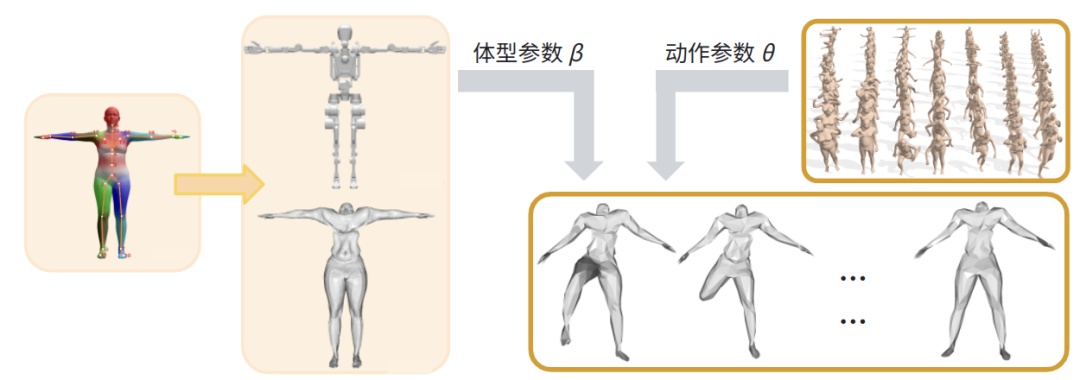
SMPL是一套描述人体动作的标准格式和映射算法,用于参数化表达动作和人体体型,其优势在于将体型的不同纳入到动作映射中。
通过优化青龙机器人的体型参数 β 使得调整后的人体模型关节位置能够更为贴近青龙机器人。体型参数匹配可以提升后续重定向的动作跟踪精度。
从数据集中收集SMPL格式的动作参数,并使用匹配得到的青龙机器人体型参数 β 将数据集的动作参数θ 映射为机器人各关节目标位置。
构造以最小化机器人各关节位置误差以及连续性误差为优化目标的优化问题,求解最优化问题得到机器人的最优关节角度。
国地中心的使命:以技术突破推动产业升级
■ 从“遥控器时代”到“生成式时代”的跨越
国地中心作为国家工信部与上海市共同揭牌成立的行业平台,始终致力于攻克人形机器人共性技术难题。此次推出MindLoongGPT,正是中心技术攻坚的里程碑式成果。
■ 战略意义:重塑人机协作生态
降低开发者门槛:中小型企业甚至个人开发者均可利用MindLoongGPT快速开发机器人应用,无需组建专业运动控制团队;
赋能新兴场景:从家庭陪护、医疗康复到工业柔性装配,MindLoongGPT的高适配性将加速人形机器人进入千行百业;
抢占国际制高点:我国在生成式AI与机器人融合领域首次实现系统性突破,为全球智能体技术发展提供“中国方案”。
■ 龙跃大模型发布在即:共建开放生态
国地中心宣布,将在大会现场开放MindLoongGPT的开发者测试版本,并联合张江科学城打造“人形机器人创新应用孵化基地”,为合作伙伴提供技术赋能、数据共享与算力支持。首批合作企业包括多家全球500强科技公司与顶尖高校研究院,共同探索人形机器人在元宇宙、智能制造等领域的深度融合。
5月29日,张江见!
2025张江具身智能开发者大会不仅是技术的秀场,更是产业的盛宴。届时,国地中心与张江集团将携手院士专家、行业领袖与开发者,展开多场技术研讨、实机演示与生态合作签约。
我们诚邀全球开发者与创新者共聚张江,见证生成式机器人运动控制的划时代变革,携手开启人机共生的智能未来!
大会详情
时间:2025年5月29日全天
地点:上海张江科学会堂
扫码报名


欢迎转发,但请注明出处“上海经信委”
觉得不错请点赞!


