
作为通用机器人公司傅利叶“Nexus 开源生态矩阵” 的首个落地项目(“N1” 即 “Nexus-01”),4月11日首款开源人形机器人 Fourier N1正式发布。
N1将为全球机器人和具身智能开发者提供一个开放创新的技术基座,加速高泛用性运动控制器、多模态模型结合以及具身载体的未来形态推演等前沿研究开发工作的验证落地。
当天,傅利叶还同步开放涵盖物料清单、设计图纸、装配指南、基础操作软件在内的完整本体资源包。
“该技术共享平台可系统性地降低研发门槛、加速技术迭代效率、促进跨领域协同创新,体现了傅利叶推动人形机器人共建生态的长期决心。”傅利叶产品研发总监蔡宇圣介绍道。
“一看即会”开源物料 帮助开发者在最短时间内完成完整复刻
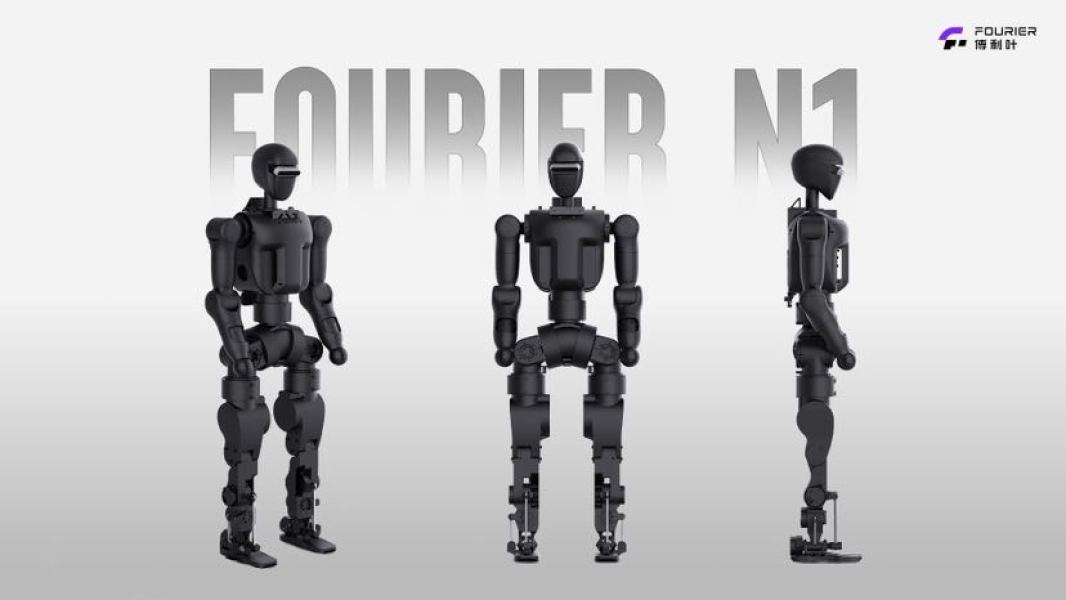
从外观上看,人形机器人Fourier N1比此前傅利叶推出的GRx系列“个头”小了不少,傅利叶方面介绍,Fourier N1 采用紧凑型硬件架构设计,身高 1.3 米,体重 38 公斤,全身拥有 23 个自由度。
虽然“身板小”,但Fourier N1整机结构由铝合金与工程塑料复合构成,在保证本体强度的同时兼顾关节灵活性。电池采用背部插拔式设计,单次连续运动续航可达2小时以上,满足高频测试与便捷部署需求。
动力系统搭载傅利叶自研的FSA2.0一体化执行器,结合自研控制系统,在提升运动稳定性与抗冲击能力的同时,实现更高精度的位姿控制。实测最高稳定奔跑速度可达 3.5 米/秒,在保持输出上限的同时兼备优越的动态响应能力。
此前,人形机器人Fourier N1已经行走在浦东的世纪公园等地,引发关注。而本次傅利叶的最新动作中,推出的开源物料是为了让全球开发者“共享”最新人形机器人技术。
记者了解到,首批开源材料覆盖从硬件到基础控制系统的核心构建要素,帮助开发者在最短时间内完成N1的完整复刻。
“我们希望推动未来技术的可能性,目前从技术发展角度来看,人形机器人产业还是属于早期阶段,希望能帮助更多的开发者来降低行业准入门槛。”蔡宇圣介绍道。
未来,傅利叶还将逐步开放针对该平台的推理代码与训练框架,为全球开发者提供更加完善的验证与开发环境。
构建全链条技术共享平台 迈向机器人生态共建
目前傅利叶GRx系列人形机器人已推出GR-1和GR-2两款机型,已经陆续覆盖到导览咨询、学术科研等应用场景。公司创始人兼CEO顾捷毕业于上海交大机械动力系,于2015年在浦东创立傅利叶,并在2019启动通用人形机器人的项目。四年后,傅利叶成为业内率先实现量产的双足通用人形机器人公司。
在多个场合,顾捷都表示过傅利叶的定位就是为AI打造一个真正意义上的本体平台、硬件平台,人形机器人要Made for AI。“十年前做人形机器人产业非常寂寞,现在有上百家企业开始做人形机器人,百花齐放的场景让我们感到非常兴奋,我相信未来人形机器人会像新能源汽车一样拥有广阔前景。”顾捷此前接受记者采访时表示。
Fourier Nexus通用机器人生态网络是傅利叶构建的以机器人本体技术为基础,贯通算法开发、硬件制造与商业化应用全链条的技术共享平台。通过"硬件开发+算法开源+数据共享"的三维架构,该技术共享平台可系统性地降低研发门槛、加速技术迭代效率、促进跨领域协同创新,体现了傅利叶推动人形机器人共建生态的长期决心。
今年3月,傅利叶已正式发布全尺寸人形机器人数据集 Fourier ActionNet,并推出全球首个覆盖采集、标注、训练、评估的全流程工具链。此次N1开源是傅利叶打造 “硬件+算法+数据” 三位一体开放体系的又一核心举措,标志着公司在人形机器人领域从单点技术突破向系统生态建设的关键一步。
傅利叶表示,未来还将持续开放更多覆盖全身控制、多任务协同的关键模块,与全球开发者共同探索人形机器人技术的未来边界。


